原文:Python+OpenCV基础教程2:平滑图像 - 2019.05.22
出处:天池大数据科研平台 - 微信公众号
文章转载自 EX2TRON'S BLOG http://ex2tron.wang/opencv-python-smoothing-images/
学习模糊/平滑图像,消除噪点。
目标:
[1] - 模糊/平滑图片来消除图片噪点.
[2] - 涉及OpenCV函数:cv2.blur(), cv2.GaussianBlur(), cv2.medianBlur(), cv2.bilateralFilter().
Python - OpenCV 之图像平滑 - AIUAI
1. 滤波和模糊
关于滤波和模糊,很多人分不清,来理理:
[1] - 它们都属于卷积,不同滤波方法之间只是卷积核不同(对线性滤波而言)
[2] - 低通滤波器是模糊,高通滤波器是锐化.
低通滤波器就是允许低频信号通过,在图像中边缘和噪点都相当于高频部分,所以低通滤波器用于去除噪点、平滑和模糊图像。
高通滤波器则反之,用来增强图像边缘,进行锐化处理。
常见噪声有椒盐噪声和高斯噪声,椒盐噪声可以理解为斑点,随机出现在图像中的黑点或白点;高斯噪声可以理解为拍摄图片时由于光照等原因造成的噪声。
2. 均值滤波
均值滤波是一种最简单的滤波处理,它取的是卷积核区域内元素的均值,用cv2.blur()实现,如3×3的卷积核:
$$ kernel = \frac{1}{9} \begin{bmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{bmatrix} $$
img = cv2.imread('lena.jpg')
blur = cv2.blur(img, (3, 3)) # 均值模糊3. 方框滤波
方框滤波跟均值滤波很像,如3×3的滤波核如下:
$$ kernel = a \begin{bmatrix} 1 & 1 & 1 \\ 1 & 1 & 1 \\ 1 & 1 & 1 \end{bmatrix} $$
用 cv2.boxFilter() 函数实现,当可选参数 normalize 为True的时候,方框滤波就是均值滤波,上式中的 a 就等于1/9;normalize为False的时候,a=1,相当于求区域内的像素和。
# 前面的均值滤波也可以用方框滤波实现:normalize=True
blur = cv2.boxFilter(img, -1, (3, 3), normalize=True)4. 高斯滤波
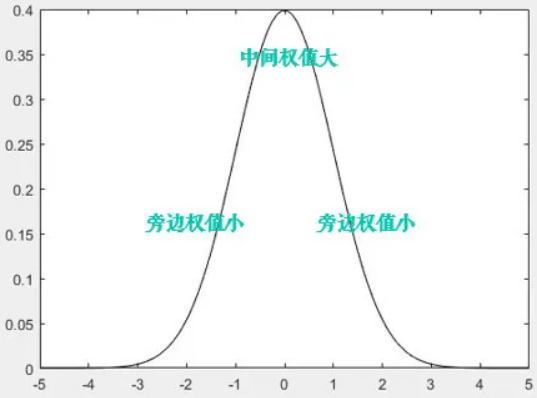
前面两种滤波方式,卷积核内的每个值都一样,也就是说图像区域中每个像素的权重也就一样。高斯滤波的卷积核权重并不相同:中间像素点权重最高,越远离中心的像素权重越小. 标准正态分布的曲线,显然这种处理元素间权值的方式更加合理一些:
图像是2维的,所以需要使用2维的高斯函数,比如 OpenCV 中默认的3×3的高斯卷积核:
OpenCV 中对应函数为 cv2.GaussianBlur(src,ksize,sigmaX):
img = cv2.imread('gaussian_noise.bmp')
# 均值滤波vs高斯滤波
blur = cv2.blur(img, (5, 5)) # 均值滤波
gaussian = cv2.GaussianBlur(img, (5, 5), 1) # 高斯滤波参数3 sigmaX值越大,模糊效果越明显。
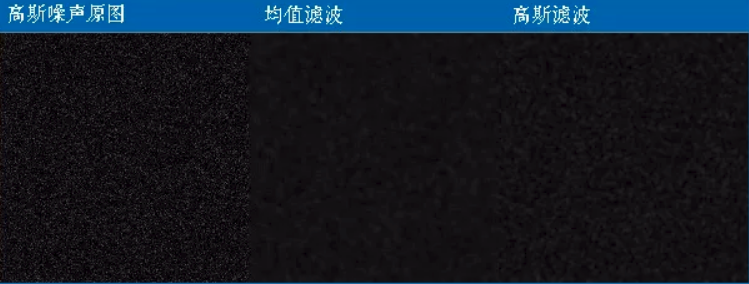
高斯滤波相比均值滤波效率要慢,但可以有效消除高斯噪声,能保留更多的图像细节,所以经常被称为最有用的滤波器。
均值滤波与高斯滤波的对比结果如下(均值滤波丢失的细节更多):
5. 中值滤波
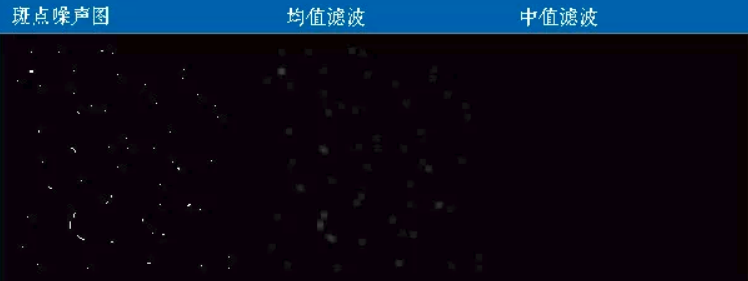
中值又叫中位数,是所有数排序后取中间的值。中值滤波就是用区域内的中值来代替本像素值,所以那种孤立的斑点,如0或255很容易消除掉,适用于去除椒盐噪声和斑点噪声。中值是一种非线性操作,效率相比前面几种线性滤波要慢。
比如下面这张斑点噪声图,用中值滤波显然更好:
6. 双边滤波
模糊操作基本都会损失掉图像细节信息,尤其前面介绍的线性滤波器,图像的边缘信息很难保留下来。然而,边缘(edge)信息是图像中很重要的一个特征,所以这才有了双边滤波。用cv2.bilateralFilter()函数实现:
img = cv2.imread('lena.jpg')
# 双边滤波vs高斯滤波
gau = cv2.GaussianBlur(img, (5, 5), 0) # 高斯滤波
blur = cv2.bilateralFilter(img, 9, 75, 75) # 双边滤波
可以看到,双边滤波明显保留了更多边缘信息.
7. 高斯滤波卷积核
要解释高斯滤波卷积核是如何生成的,需要先复习下概率论的知识:
一维的高斯函数/正态分布:$X \backsim N(\mu, \sigma^2)$
$$ G(x) = \frac{1}{\sqrt{2 \pi} \sigma} exp(- \frac{(x - \mu)^2}{2 \sigma^2}) $$
当 $\mu=0, \sigma^2=1$ 时,称之为标准正态分布:$X \backsim N(0, 1)$
$$ G(x) = \frac{1}{\sqrt{2 \pi}} exp(- \frac{x^2}{2}) $$
二维X/Y相互独立的高斯函数:
$$ G(x, y) = \frac{1}{2 \pi \sigma_x \sigma_y} exp(- \frac{(x - \mu_x)^2 + (y - \mu_y)^2}{2 \sigma_x \sigma_y}) = G(x)G(y) $$
由上可知,二维高斯函数具有可分离性,所以 OpenCV 分两步计算二维高斯卷积,先水平再垂直,每个方向上都是一维的卷积。OpenCV中这个一维卷积的计算公式类似于上面的一维高斯函数:
$$ G(i) = \alpha * exp(- \frac{(i - \frac{ksize - 1}{2})^2}{2 \sigma^2}) $$
其中,$i = 0, ..., ksize-1$,$\alpha$ 是一个常数,也称为缩放因子,使得 $\sum G(i) = 1$.
比如,可以使用 cv2.getGaussianKernel(ksize, sigma) 生成一堆卷积核:
[1] - $sigma <=0$ 时,$sigma = 0.3 * ((ksize-1) * 0.5 - 1) + 0.8$
[2] - $sigma > 0$ 时,$sigma=sigma$.
print(cv2.getGaussianKernel(3, 0))
# 结果:[[0.25][0.5][0.25]]生成之后,先进行三次的水平卷积:
$$ I \times \begin{bmatrix} 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \end{bmatrix} $$
然后再进行垂直的三次卷积:
$$ I \times \begin{bmatrix} 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \end{bmatrix} \times \begin{bmatrix} 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \\ 0.25 & 0.5 & 0.25 \end{bmatrix} = I \times \begin{bmatrix} 0.0625 & 0.125 & 0.0625 \\ 0.125 & 0.25 & 0.125 \\ 0.0625 & 0.125 & 0.0625 \end{bmatrix} $$
这就是OpenCV中高斯卷积核的生成方式。其实,OpenCV源码中对小于7×7的核是直接计算好放在数组里面的,这样计算速度会快一点,感兴趣的可以看下源码:getGaussianKernel().
上面矩阵也可以写成:
$$ \frac{1}{16} \begin{bmatrix} 1 & 2 & 1 \\ 2 & 4 & 2 \\ 1 & 2 & 1 \end{bmatrix} $$
8. 小结
[1] - 在不知道用什么滤波器好的时候,优先高斯滤波cv2.GaussianBlur(),然后均值滤波cv2.blur()。
[2] - 斑点和椒盐噪声优先使用中值滤波cv2.medianBlur()。
[3] - 要去除噪点的同时尽可能保留更多的边缘信息,使用双边滤波cv2.bilateralFilter()。
[4] - 线性滤波方式:均值滤波、方框滤波、高斯滤波(速度相对快)。
[5] - 非线性滤波方式:中值滤波、双边滤波(速度相对慢)。