论文: DeepFashion: Powering Robust Clothes Recognition and Retrieval with Rich Annotations
作者: Ziwei Liu, Ping Luo, Shi Qiu, Xiaogang Wang, Xiaoou Tang
团队: CUHK, SenseTime Group Limited(商汤), CAS
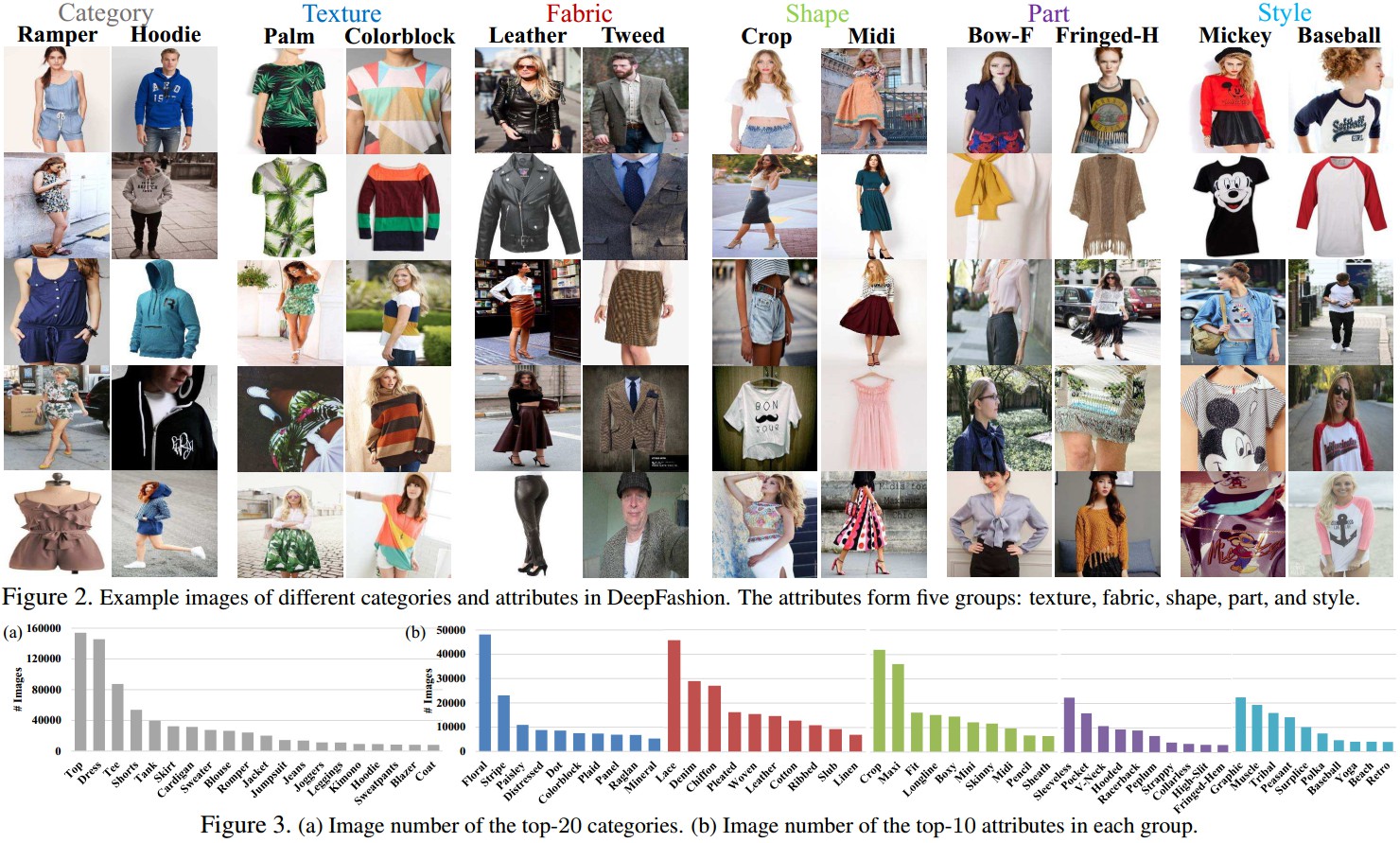
1. DeepFashion Dataset
- 综合性强(Comprehensiveness) —— 标注信息包括:50 fine-grained categories, 1000 attributes, landmarks, bounding box, 300000 cross-pose/cross-domain pair correspondences.
- 规模大(Scale) —— 超过 800K 标注的服装图像
- 可利用性好(Availability) —— 对研究性应用公开.
针对服装识别和检索,数据标注主要考虑三个方面:
- 大规模属性(Massive attributes) - 对于服装商品识别必须的信息;
- 关键点(Landmarks) - 关键点位置能够有效处理形变和姿态变化;
- 买家与商家对(Consumer-to-shop pairs) - 建立 cross-domain gap 的桥梁.
DeepFashon 数据集用途:
- 类别与属性预测(Category and Attribute Prediction)
该任务是对 50 个fine-gained 类别和 1000 个属性进行分类. 共 63720 张标注图片.
- 对于类别分类,采用标准的 top-k 分类精度 作为评价准则; 1-of-K classification problem.
- 对于属性预测,采用 top-k recall rate 作为评价准则,通过对 1000 个分类 scores 进行排名,检测在 top-k 中所匹配的属性数量; multi-label tagging problem.
- 商家服装检索(In-Shop Clothes Retrieval)
该任务是判断两张商家图像是否属于同一款. 共 11735 款服装,54642 张图片(From Forever21).
采用 top-k 检索精度作为评价准则,如果在 top-k 检索结果中能够精确找到服装款,则认为是检索正确. - 买家到商家服装检索(Consumer-to-Shop Clothes Retrieval)
该任务是匹配买家所拍照片与商家的服装. 251361 张买家与商家对{From Mogujie).
采用 top-k 检索精度作为评价准则.
2. FashionNet
通过联合预测服装属性 (clothing attributes) 和关键点(landmarks) 来学习服装特征. 再利用估计的关键点位置来池化(pool/gate) 学习的特征. 以迭代的方式进行.
2.1 网络结构
基础网络采用 VGG16 . 从开始到倒数第二层,与VGG16相同,最后一个卷积层重新设计用于服装问题. 如图:
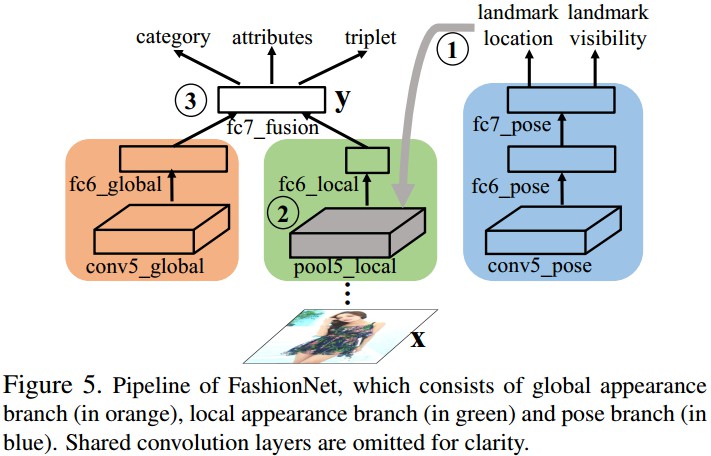
Figure 5. FashionNet 结构. 包括全局特征分支(橙色部分),局部特征分支(绿色部分),pose 分支(蓝色分支). 其中,忽略了共享卷积层.
全局特征分支—— 整个服装商品的全局特征;
局部特征分支—— 由估计的服装关键点池化(pooling) 得到服装的局部特征;
Pose分支—— 预测关键点位置及其可见性(可见性指,关键点是否存在).
橙色分支和绿色分支的输出在 fc7_fusion 层连接,以联合预测服装类别、属性,对服装对建模.
2.2 前向传播(Forward Pass)
FusionNet 主要包括三个阶段:
- Stage 1 - 服装图像输入网络,并在蓝色分支传递,以预测关键点位置;
- Stage 2 - 在 pool5_local 层对估计的关键点进行池化(pooling or gate)特征,以使布局特征对服装形变和缺失具有不变性;
- Stage 3 - 在 fc7_fusion 对 fc6_global 层全局特征和 fc6_local池化后的关键点局部特征进行连接.
2.3 反向传播(Backward Pass)
FusionNet 有四种损失函数,以迭代方式进行.
四种损失函数主要是:
- 关键点定位的 regression loss;
L2 regression loss:
${ L_{landmarks} = \sum _{j=1} ^{|D|} ||\mathbf{v}_j \cdot (\check{l}_j- l_j)||_2^2 }$
${ D }$ - 训练样本数;
${ \check{l}_j }$ - 第 j 个样本的 groundtruth 关键点位置;
${ \mathbf{v}_j }$ - 第 j 个样本的关键点可见性向量,1 表示可见,0 表示不可见;
这里,关键点可见性变量可以纠正关键点 groundtruth 位置的丢失,如果某个关键点丢失的化,该erro则不进行反向传播. - 关键点可见性和服装类别预测的 softmax loss;
1-of-K softmax loss 来对关键点可见性和 fine-grained 类别进行分类, 分别记为 ${L_{visibility} }$ 和 ${L_{category} }$. - 属性预测的 cross-entropy loss;
加权 cross-entropy loss:
${ L_{attributes} = \sum_{j=1}^{|D|} (w_{pos} \cdot \mathbf{a}_j log p(\mathbf{a}_j | \mathbf{x}_j) + w _{neg} \cdot (1- \mathbf{a}_j)log(1- p(\mathbf{a}_j | \mathbf{x}_j))) }$
其中,
${ \mathbf{x}_j }$ 和 ${ \mathbf{a}_j }$ 分别表示第 j 张服装图像及对应的属性标签;
${ w_{pos} }$ 和 ${ w_{neg} }$ 为两个系数,由训练集中 positive 和 negetive 样本数量的比率确定.
- 成对(pairwise)服装图像度量学习的 triplet loss
服装图像对的度量采用 triplet loss,增强 positive 和 negetive 样本的距离约束:
${ L_{triplet} = \sum _{j=1}^{|D|} max{0, m+d(\mathbf{x}_j, \mathbf{x}_j^{+})- d(\mathbf{x}_j, \mathbf{x}_j^{-})} }$
其中,
${ (\mathbf{x}_j, \mathbf{x}_j^{+}, \mathbf{x}_j^{-}) }$ 为一个三元组,${ \mathbf{x}^{+} }$ 和 ${ \mathbf{x}^{-} }$ 分别表示关于图像 ${ \mathbf{x} }$ 的相同款图像与不同款图像.
${ d(\cdot, \cdot) }$ 为距离函数;
${ m }$ 为 边缘参数(margin parameter).
迭代训练策略主要包括两步:
- Step 1 - 蓝色分支作为主要task,其它分支作为辅助 tasks.
对 ${ L_{visibility} }$ 和 ${ L_{landmark} }$ 赋予较大权重,其它 loss 赋予较小权重. 由于其它任务和关键点估计的相关性,故可以利用其它任务来辅助训练关键点估计任务. - Step 2 - 预测服装类别和属性,同时学习服装图像的成对关联性(pairwise relations).
这里利用估计的关键点位置来池化(pool) 局部特征.
以上两部迭代进行,指导收敛.
2.4 关键点池化层(Landmark Pooling Layer)
关键点池化层是 FusionNet 的重要组成. 如图:
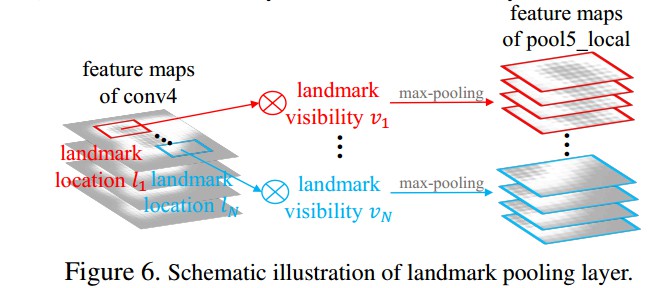
landmark pooling 层的输入是 feature maps(如 conv4 ) 和 估计的 landmarks.
针对每一个关键点位置 ${ l }$,
首先,确定其可见性 ${ v }$. 不可见关键点的响应设为 0;
然后,对关键点周围区域进行 max-pooling 操作,以得到局部 feature maps,并堆积成为 pool5_local 层的最终 feature maps.
landmark pooling 层的反向传播类似于 Fast R-CNN中的 RoI pooling 层. 不同之处在于,Fast R-CNN中的 RoI 层将池化的区域(pooled regions) 独立对待,landmark pooling 层通过连接局部特征来捕捉不同服装关键点的交互关联性(interaction).